

Please also see my previous article.
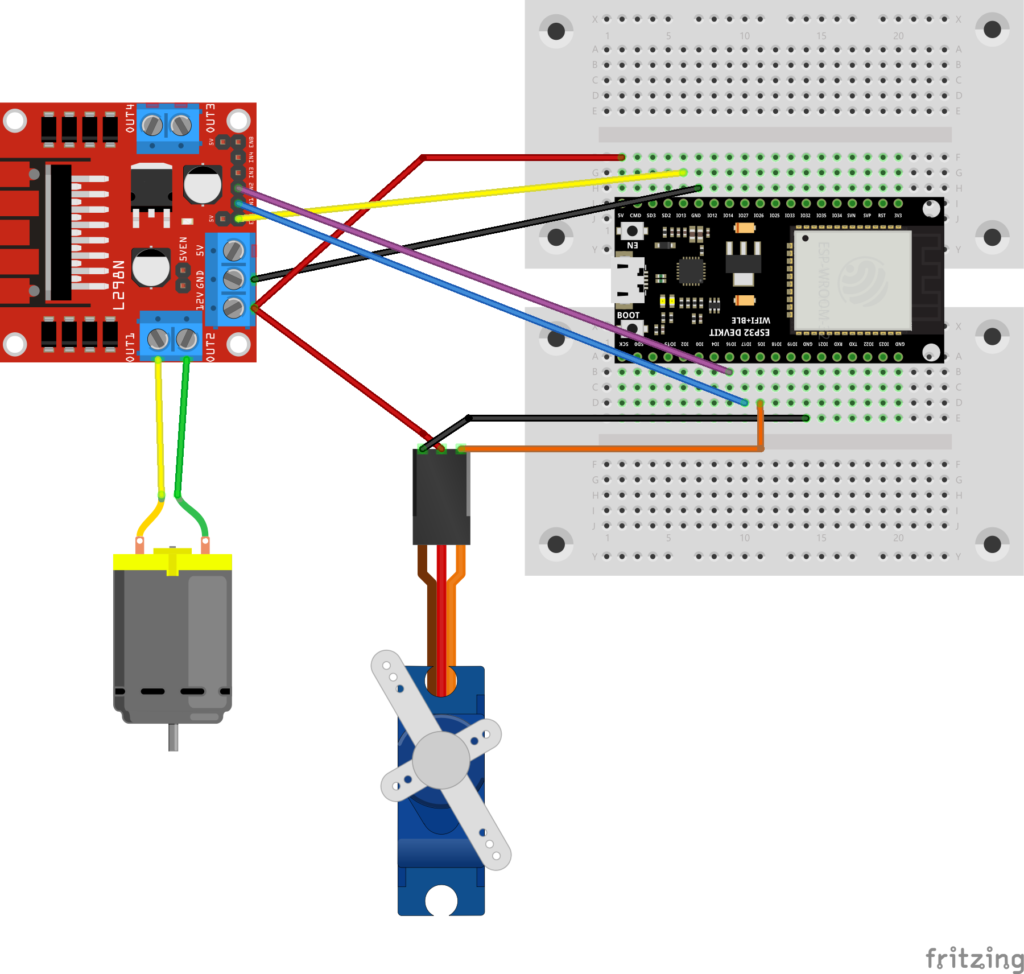
Wiring diagram and notes
Note that the terminal marked 5V on the L298 is not wired anywhere; input power from the terminal marked 12V.
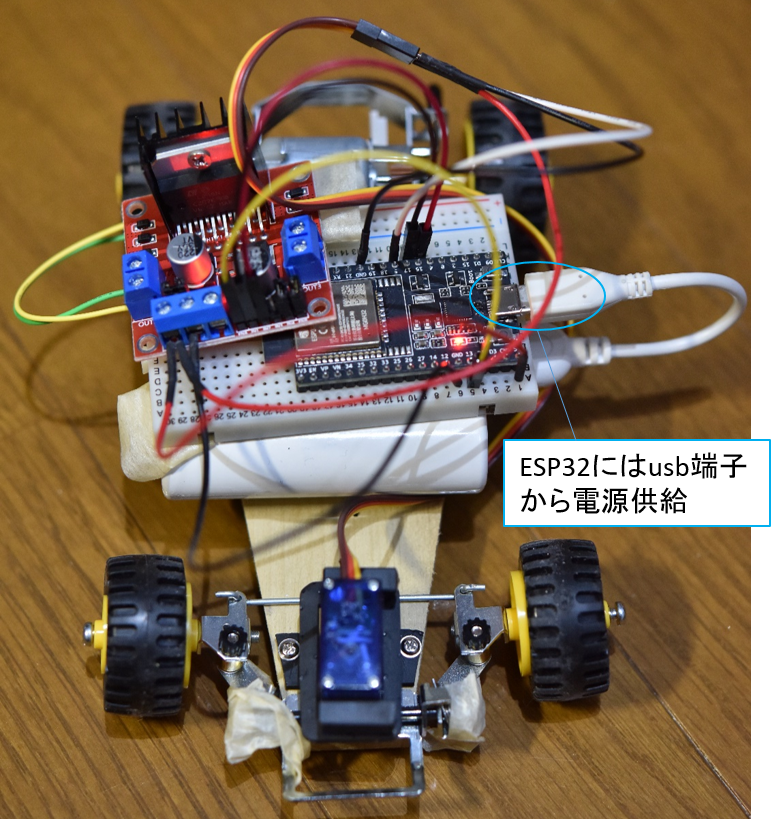
The ESP32 was powered from the usb terminal with a mobile battery.
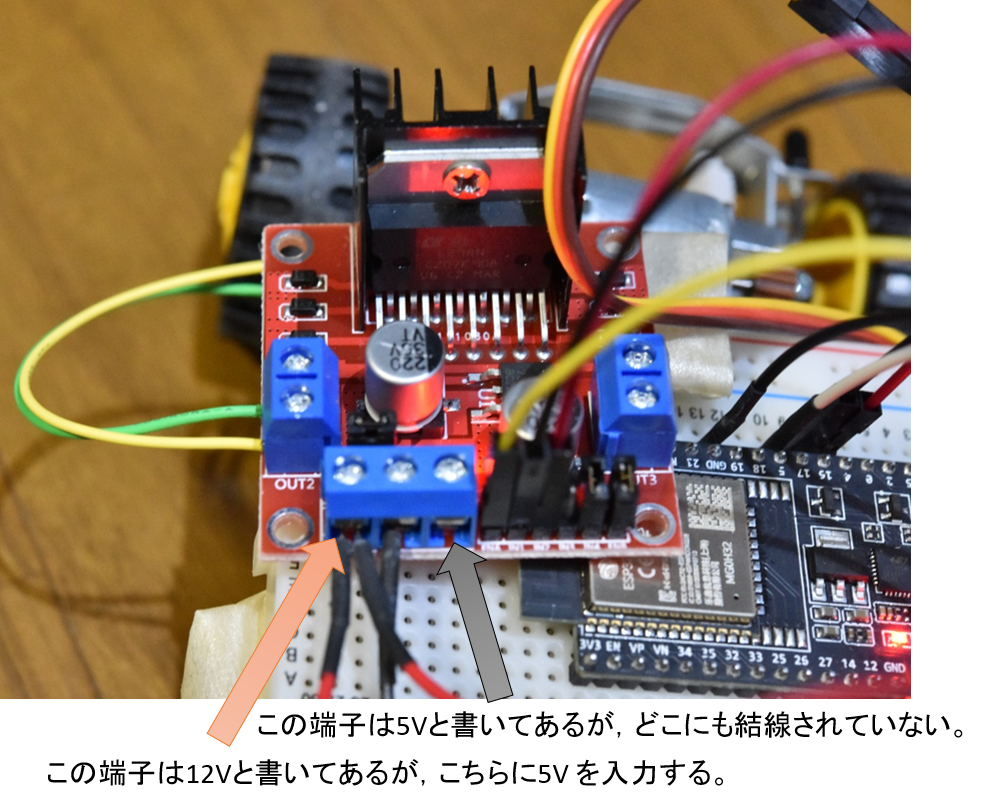
Red arrow; This terminal is marked 12V, but connect this terminal to 5V.
Code
The code is as follows. I modified the code from this site a little (mainly the settings for using the L298N motor driver).
// https://newstubby.net/diy-rc6/
#include<ESP32Servo.h>
#include <Ps3Controller.h>
#define SERVO_OUT 5 //5PIN for Servo PWM
//#define DAC1 25 //25PIN for DAC
#define ENA 13 //13PIN for L298N ENA
#define IN1 17 //16PIN for TA7291 IN1
#define IN2 16 //17PIN for TA7291 IN2
#define VREF_MAX_CW 232 // Plus Velocity limit; 3.3V * 232 /255 = 3.0V
#define VREF_MAX_CCW 127 // Minus Velocity limit; 3.3V * 127 /255 = 1.64V
#define INIT_ANGLE 90 //initial servo angle
Servo myServo;
int joy_left_y; //left joy stick Y axis
int joy_right_x; //right joy stick X axis
int servo_angle; //servo angle
const int freq_servo = 50; //servo frequency
int vref; //TA7291 Vref, input boltage 0~255 0~3.3V
const int freq_dc = 50; //500;
const int pwm_channel = 13; //0(original value) is not correct because the servo channel is also 0.
const int resolution = 8; //SS
const float joy2servo = 0.1200f; //joy stick input to servo angle conversion gain
void setup() {
//myServo.attach(SERVO_OUT);
myServo.attach(SERVO_OUT, 500, 2400); //
myServo.write(INIT_ANGLE); //servo angle initialization
myServo.setPeriodHertz(freq_servo); //SS
Ps3.begin("**:**:**:**:**:**"); //MAC address for PS3 controller ##Note; Please input your Mac address
pinMode(IN1,OUTPUT);
pinMode(IN2,OUTPUT);
pinMode(ENA, OUTPUT); //
//digitalWrite(IN1,HIGH); //
//digitalWrite(IN2,HIGH); //
digitalWrite(IN1, LOW); //
digitalWrite(IN2, LOW); //
vref = 0;
//dacWrite(DAC1,vref);
//dacWrite(pwm_channel,vref); //SS
ledcWrite(pwm_channel, vref); //SS
ledcSetup(pwm_channel, freq_dc, resolution); //
ledcAttachPin(ENA, pwm_channel); //
Serial.begin(115200); //For Debug
}
void loop() {
if(!Ps3.isConnected())
return;
//--------------------------------------//
// Left joystick Y axis //
//--------------------------------------//
if( Ps3.event.analog_changed.stick.ly ){
joy_left_y = Ps3.data.analog.stick.ly;
//convert joystick value to VREF
vref = abs(joy_left_y * 2);
//------FWD control-------//
if(joy_left_y < -10){
//vref limit
if(vref > VREF_MAX_CW)
vref = VREF_MAX_CW;
//dacWrite(DAC1,vref);
ledcWrite(pwm_channel, vref); //TH
digitalWrite(IN1,LOW);
digitalWrite(IN2,HIGH);
}
//------reverse control--------//
else if(joy_left_y > 10){
//vref limit
if(vref > VREF_MAX_CCW)
vref = VREF_MAX_CCW;
//dacWrite(DAC1,vref);
ledcWrite(pwm_channel, vref); //TH
digitalWrite(IN1,HIGH);
digitalWrite(IN2,LOW);
}
//------STOP mortion--------//
else{
//dacWrite(DAC1,0);
ledcWrite(pwm_channel, 0); //TH
//digitalWrite(IN1,HIGH);
//digitalWrite(IN2,HIGH);
digitalWrite(IN1,LOW); //
digitalWrite(IN2,LOW); //
delay(10); //wait 10ms when joystick value within ±5 to prevent sudden reverse direction
}
Serial.println("vref= "); //For debug
Serial.println(vref); //For debug
Serial.println("pwm_channel= "); //For debug
Serial.println(pwm_channel); //For debug
}
//------------------------------------//
// Right joystick X axis //
//-----------------------------------//
if( Ps3.event.analog_changed.stick.rx ){
joy_right_x = Ps3.data.analog.stick.rx;
//The following can be done without, but +/- 5 is considered a blind zone.
if(abs(joy_right_x) < 5){
joy_right_x = 0;
}
//joy stick input to servo angle conversion
//servo_angle = (int)(-joy2servo * joy_right_x + INIT_ANGLE);
servo_angle = (int)(joy2servo * joy_right_x + INIT_ANGLE); // +/-reverse
myServo.write(servo_angle);
}
Serial.println("servo_angle="); //For debug
Serial.println(servo_angle); //For debug
}
Let’s play
It is completed! After all, it is fun to build and play by myself instead of buying a commercially available radio controller.
The breadboard is still intact and the wiring is bare, but I don’t really care about that, so my RC baby carriage building is now closed.


コメント