 3Dプリンタ
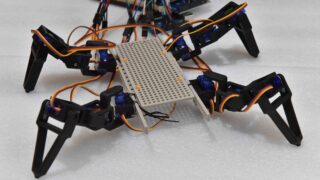
3Dプリンタ 多脚ロボットを作る!4脚ロボットを動かしてみる
こちらの記事でサーボモータをゆっくり動かすライブラリ(VarSpeedServo.h)と多数のサーボモータを動かすPCA9685の併用が難しいことが分かったので,今回は2台のArduinoを使って,それぞれ2脚ずつ(サーボモータ6個ずつ)接...
 3Dプリンタ
3Dプリンタ 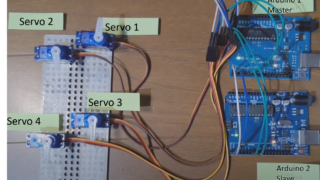 Arduino
Arduino  電子工作
電子工作  3Dプリンタ
3Dプリンタ  Arduino
Arduino  電子工作
電子工作  Arduino Arduino
Arduino Arduino  3Dプリンタ
3Dプリンタ  ESP32
ESP32